
Project Requirements
Project requirements and introductory slides available here
dtrusko@gmail.com | (415) 860-5126
Our entry into the Los Alamos National Labs hackathon, hosted at Arizona State University Polytechnic. Our task was to develop a method to help prevent radiological contamination for glove box operators working at the lab. We were given 24 hours to complete our project, from ideation to completion, and we ended up bringing home the $2500 scholarship from our design.
Dominick Trusko
William Peña
Gwen Eging
Cole Lacket
Michaela De Angelis Werner
Design Competition
Project requirements and introductory slides available here

Our Final Presentation with videos and animations included.
Developed for the Los Alamos National Labs 2025 Spring Hackathon
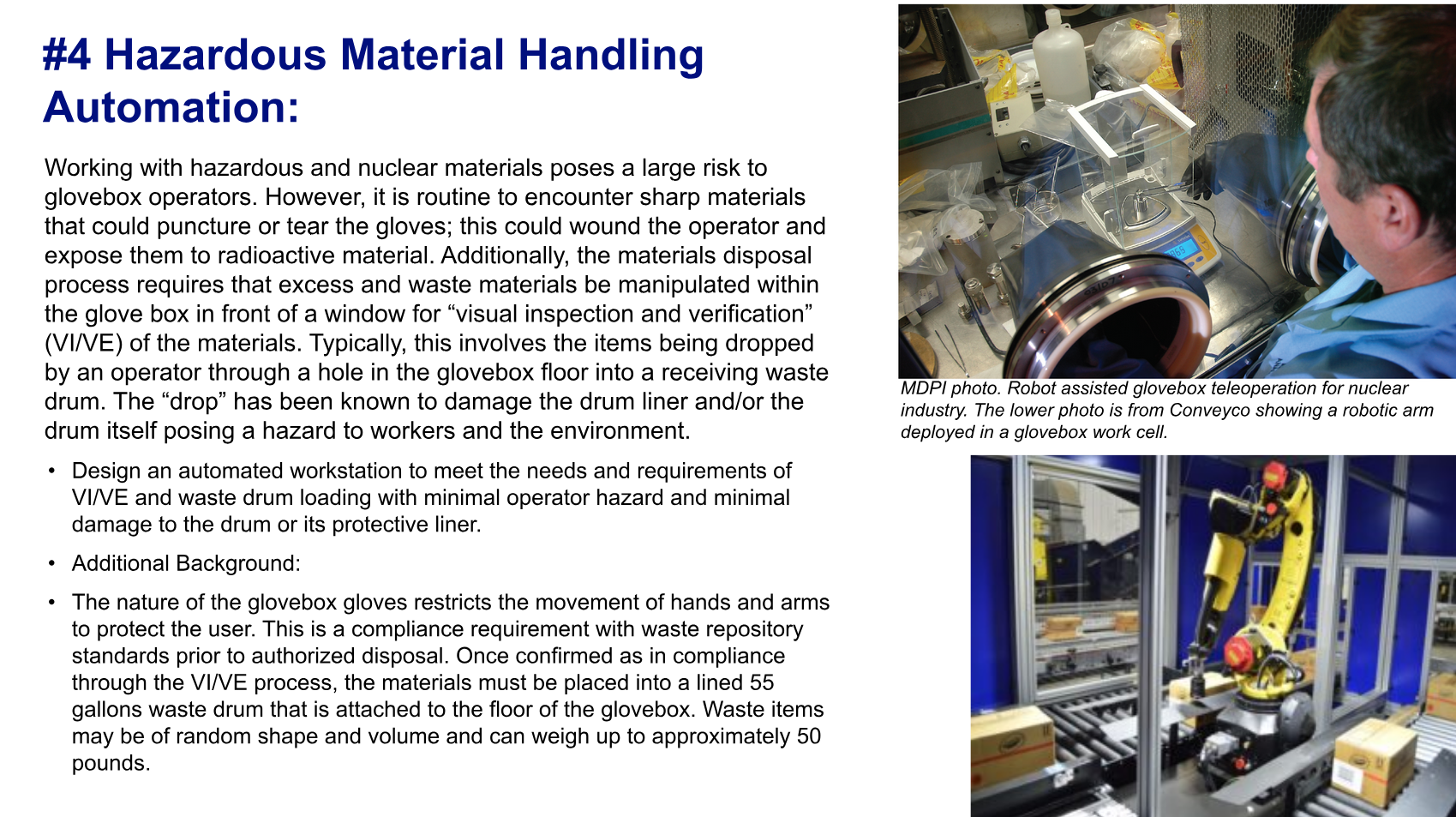
The Problem: Los Alamos National Labs has a rather archaic system for radioactive waste disposal. To try to alleviate this, they decided to host tournaments for students to devise ideas for ways to tackle a few primary issues with their current system.
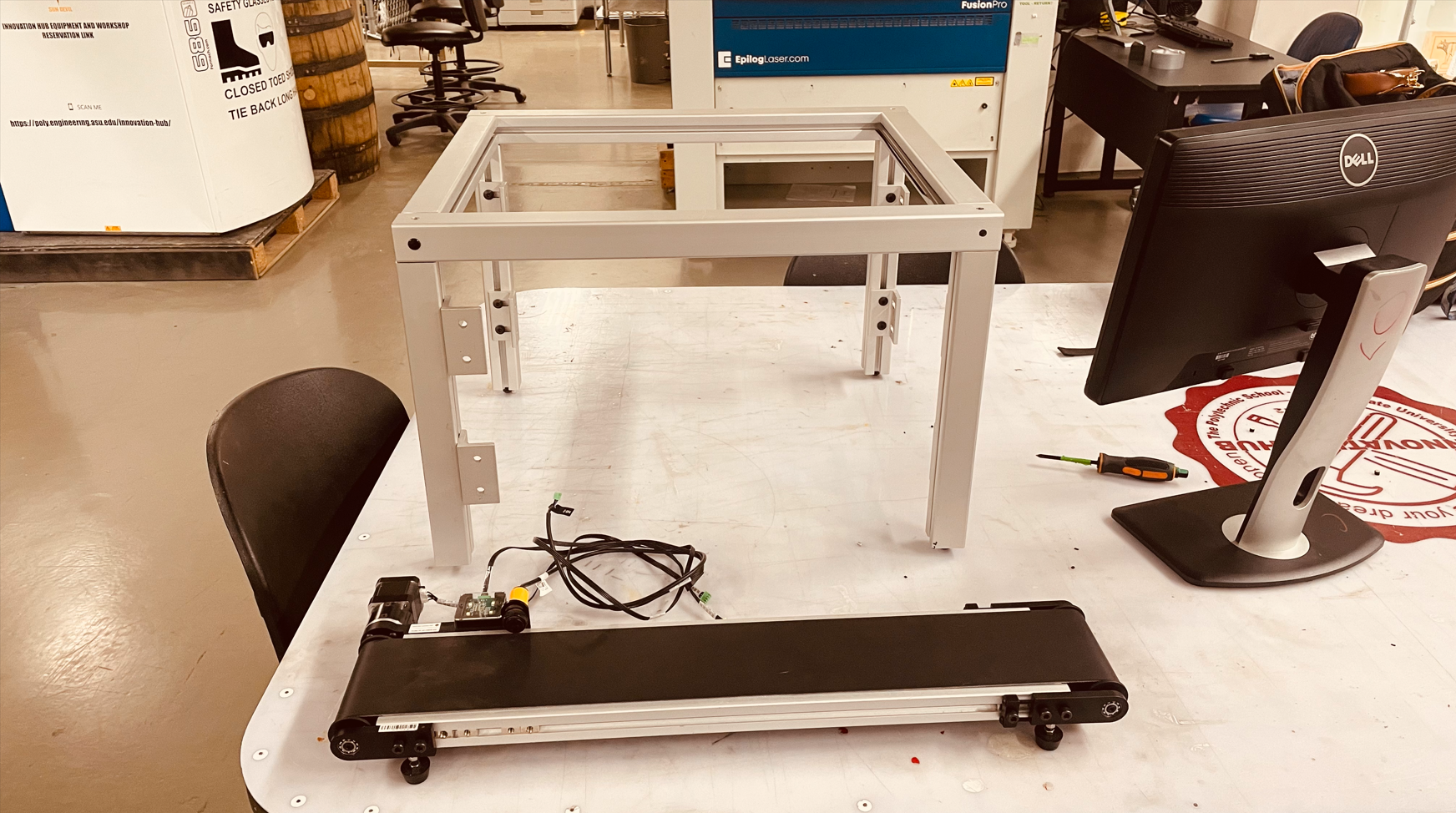
Design Considerations: Our team decided to try to meet these goals utilizing telepresence. Trying to remove the operator from the assembly, while not severely hindering their ability to fullfil their role. To do this, we decided to use a Dobot Magician Lite, as they were made available for project teams, as well as a stepper-motor driven conveyor belt. All other components were technically supplementary, but were effective at conveying our idea. Our final design was decided on Friday, so to convey this information to our advisor from Los Alamos I created this animation in 2 hours using Blender.
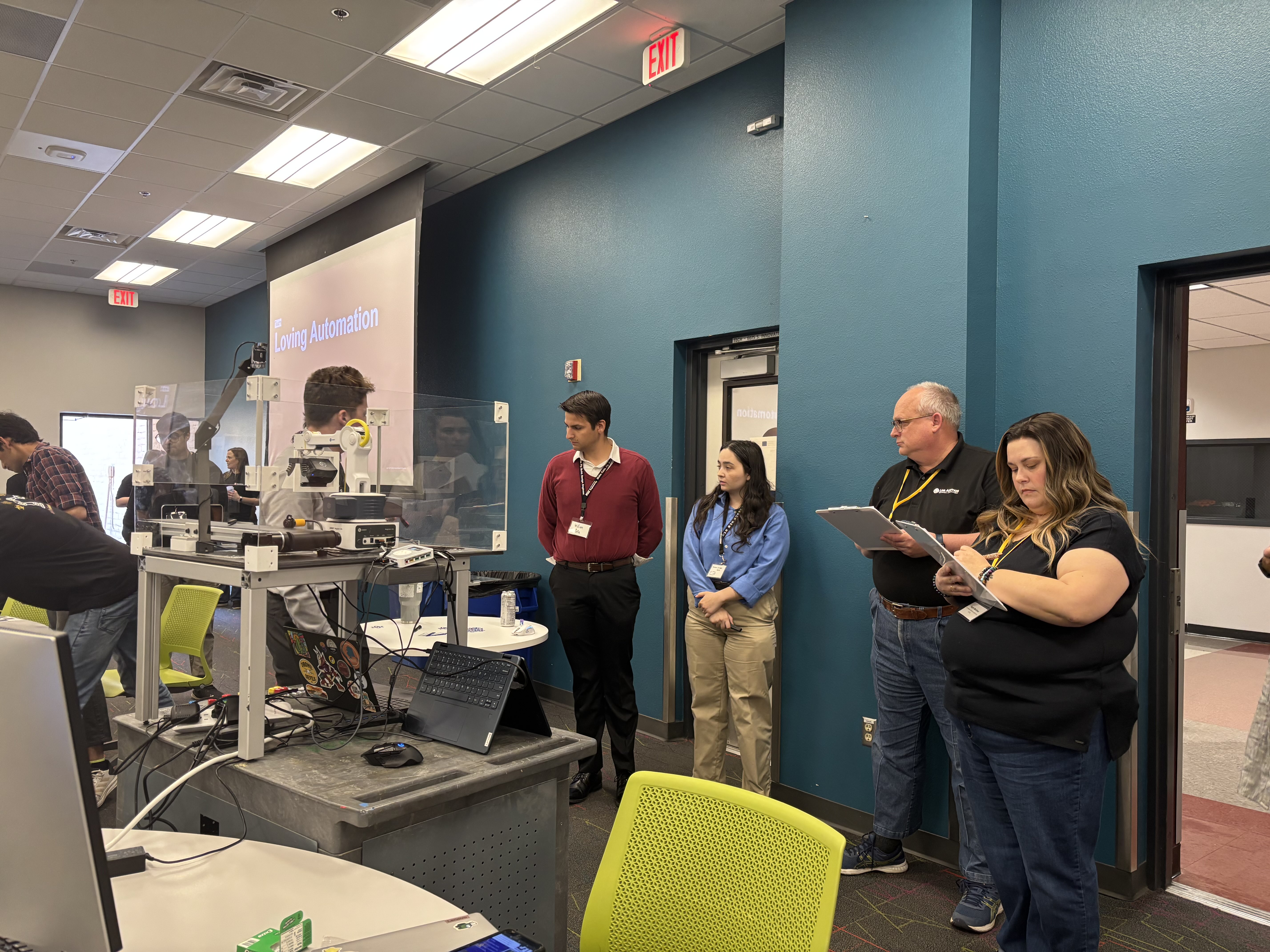
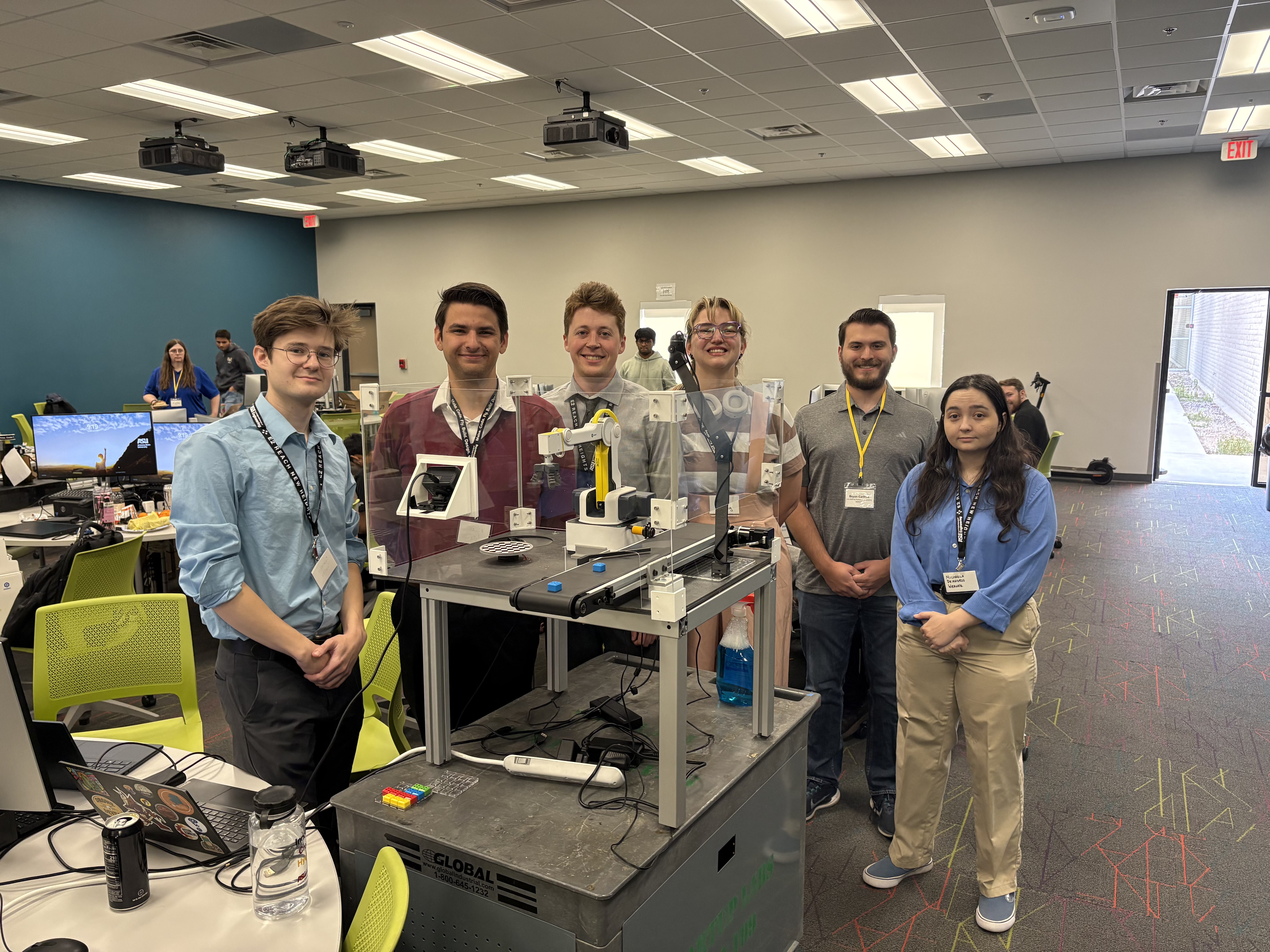
We got to building Saturday morning around 8am. Our roboticists began programming the robot, while the electrical and mechanical people got to work on the enclosure. I made the user interface with PyGUI pretty quickly, it was chosen since the documentation is fantastic. Below are a collection of images from our workspace taken by the event photographer showing our working Saturday. We were extremely tired due to the nature of the project timeframe, our data preservation skills were rather poor given our rushed timeframe, much of it had to be submitted with the submission with the data cleared from our machines.







We stayed up all night Saturday to ensure we tested all edge cases for the final presentation Sunday morning. We also spent Sunday morning making the video and finalizing the presentation. Below is the video of the final project running, while I explain what is happening during each phase of the process.
Presentation: Our project was a showstopped, many groups had only concepted their designs, with little to no prototyping, while our design was a nearly fully functional prototype (An actualy production variant of this system would include a mass-spectrometer). After the award ceremony, all we wanted to do was go home and sleep, this image was taken after the ceremony to commemorate our $2500 scholarship win.
Post-Mortem: Our team learned a lot due to the cross-disciplinary project. Everyone had to learn a little about everyone else's field to cooperate, and it certainly helped us all become better engineers. The only major hardware hiccup we ran into was that Windows only allows you to poll a single webcam at a time, and the onboard processor for the robot could not switch camera feeds rapidly enough to handle the motion tracking across two cameras. Our final solution was to offload the HD camera to a second computer that would encode relevant information and send it back to the primary machine for the tracking solution.
Eget mattis at, laoreet vel amet sed velit aliquam diam ante, dolor aliquet sit amet vulputate mattis amet laoreet lorem.

Eget mattis at, laoreet vel amet sed velit aliquam diam ante, dolor aliquet sit amet vulputate mattis amet laoreet lorem.

Eget mattis at, laoreet vel amet sed velit aliquam diam ante, dolor aliquet sit amet vulputate mattis amet laoreet lorem.